Ouvrage
La conception mécanique
Méthodologie et optimisation
384 pages
Citer cet ouvrage
- BOISSEAU, Philippe,
- Boisseau, Philippe.
- Boisseau, P.


































































































































































































































Figure

Figure 8.9 – Copie du sous-assemblage et positionnement de la copie à partir du support du coulisseau














Figure

Figure 8.24 – Création du plan d’esquisse dans l’esquisse d’assemblage et de l’esquisse de la queue d’aronde








Figure

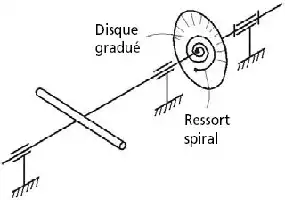
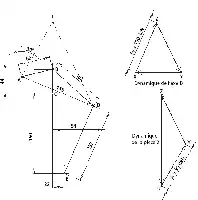
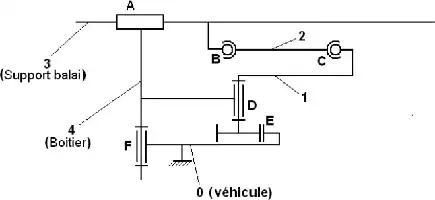
Figure 10.2 – Solution 1 : La force de contact est assurée par le ressort de compression et le calcul du couple de frottement se fait par mesure de la déformation angulaire du ressort de compression9782100754793-Boisseau.indb 26526/08/16 10:58
Figure

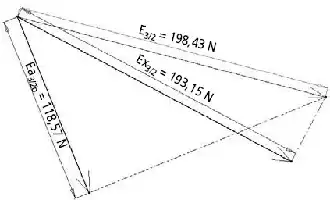
Figure 10.3 – Solution 2 : Le calcul de la force de frottement se fait à partir de la mesure de la déformation du ressort